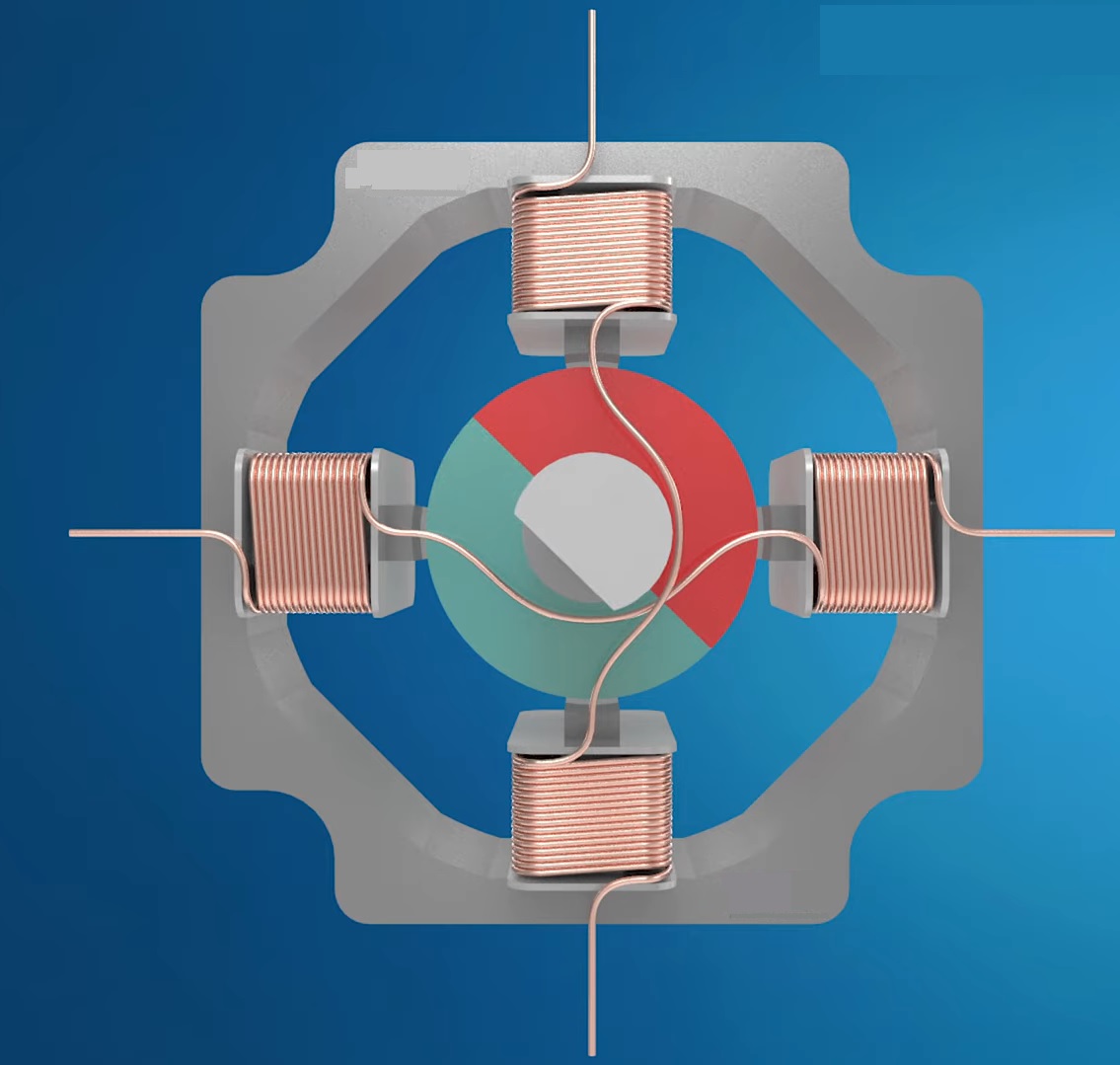
Un motorino in corrente continua ha una struttura interna che può essere semplificata come quella in figura.
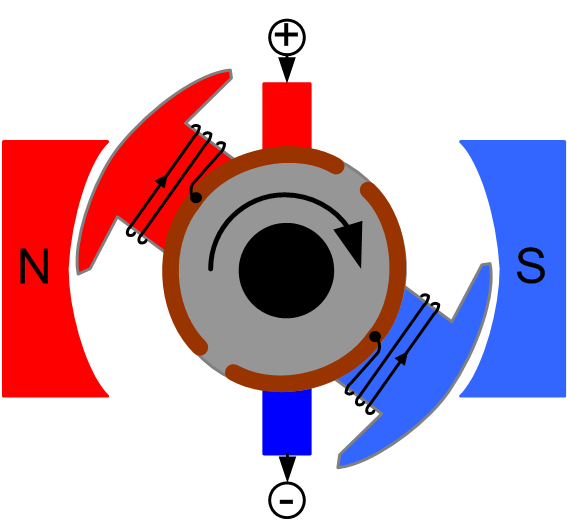
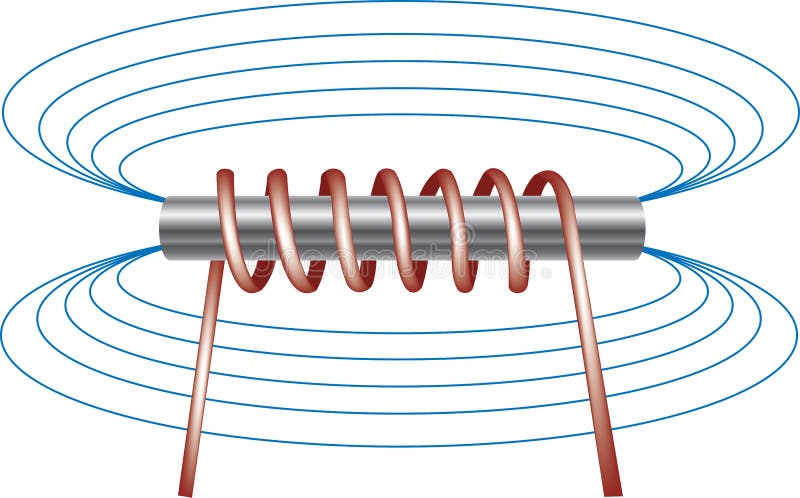
Il motore possiede un corpo metallico esterno, detto “Statore”, che è dotato di un magnete permanente, da un lato c’è il polo N, dall’altro il S. Al suo interno c’è invece un elettromagnete cioè un magnete che funziona se alimentato da corrente elettrica. Un elettromagnete non è altro che un pezzo di ferro dolce attorno al quale si avvolge del filo conduttore (rame). Se facciamo passare corrente nel filo, il pezzo di metallo diventa una calamita.
L’elettromagnete interno al motore viene chiamato “rotore” perché è libero di girare su un asse. Se faccio passare corrente nell’elettrocalamita avrò un magnete dentro un altro magnete e questo comporta che le forze magnetiche cominciano ad interagire fra di loro. Come sapete se avvicino 2 calamite posso avere due fenomeni: o si attaccano tra di loro oppure, se giro al contrario una di esse, le calamite si respingono: si attraggono i poli contrari (S-N), si respingono quelli eguali ( S-S e N-N).

Il motore funziona proprio grazie a queste forze: se collego la corrente, l’elettrocalamita interna si sposta e ruota per allineare il polo N con quello S del magnete esterno (quello dello statore) ed il polo N con quello S dello statore. Se allora inverto i poli della corrente, il magnete interno si inverte ed il polo S si scambia con quello N, pertanto il rotore ricomincia a ruotare per riallinearsi con il magnete esterno. Se questo processo viene ripetuto avrò il funzionamento del motore elettrico.
 (da wikipedia)
(da wikipedia)
Poiché l’elettrocalamita ruota, ess non può essere collegata all’alimentazione con normali fili di collegamenti, che finirebbero per intrecciarsi e rompersi. C’è bisogno di un “contatto strisciante” : l’alimentatore ha dei terminali che “strisciano” sui terminali dell’elettrocalamita e trasmettano corrente. Questo sistema è detto “spazzola2, perciò questi motori vengono detti “a spazzola” o “brush” in inglese.
I motorini in corrente continua hanno, perciò. due soli fili di alimentazione. Il sistema a spazzole interno provvede ad alimentare correttamente il rotore interno ed è possibile aumentare o diminuire la velocità di rotazione fornendo una corrente modulata in ampiezza ( un segnale PWM) oppure invertire il verso di rotazione, invertendo i poli de alimentazione.
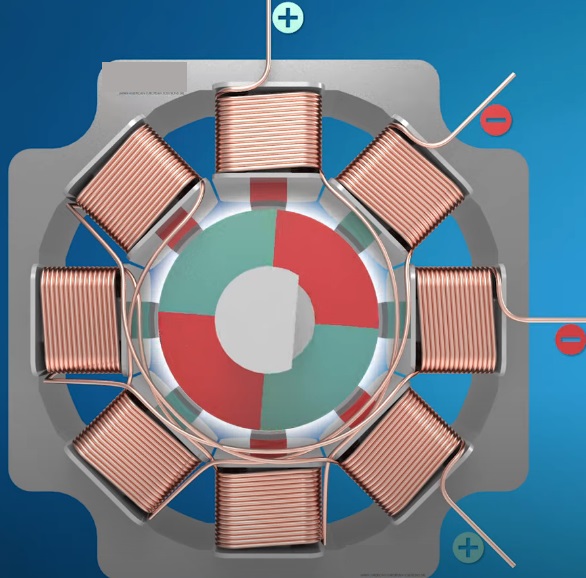
Un motore più preciso, nel movimento, che può essere ruotato di angoli molto piccoli è il “motore passo passo”. In esso sono presenti numerose elettrocalamite: attorno a tutto il motore (360°) si possono posizionare 100 magneti o 200 o un altro numero di solito indicato sul foglio tecnico del motore. Se ho 100 magneti posso chiedere al motore di ruotarsi di una angolo molto piccolo pari a 360/100 = 3.6° ottenendo un funzionamento molto utile per gli automi o i robot. Se uso uno stepper motor con 200 passi avrò rotazioni ancora più precise di 1.8°.
La struttura interna del motore “passo passo2 o stepper motor è quindi questa nella figura sotto. In essa sono indicati sono 4 magneti che sono disposti all’esterno (statore) mentre il rotore è un magnete permanente. Alimentando a turno ognuno dei 4 elettromagneti abbiamo 4 passi di rotazione. Immaginatevi se avessimo 100 elettromagneti!
Lo stepper motor possiede più di 2 fili, il Nema 17 giù in foto, uno steppe motor per stampanti 3d e modellismo, a 6 fili in uscita, funziona a 4V, assorbe 1,2A (ben oltre le capacità dei pin di Arduino) ha una coppia in grado di spostare 3,2Kg-cm al massimo, un diametro dell’asse di 5mm.
- la coppia di fili rosso/blu accede ad una serie di bobine,
- la coppia di fili nero/verde accede all’altra serie di bobine
 |
 |
 |
L’aspetto di un motore passo passo.




Fonti e risorse utilizzate:
https://copperalliance.it/risorse-professionali/programmi-per-le-scuole/fisica-elettromagneti/
https://library.weschool.com/lezione/legge-di-faraday-spiegazione-e-dimostrazione-pratica-7636.html
https://it.dreamstime.com/fotografie-stock-libere-da-diritti-elettromagnete-image6974338